
State and Prove Parallel Axis and Perpendicular Axis Theorems
Understanding the mechanics of rotational motion is crucial in physics, and calculating the moment of inertia is at the heart of it. Let’s dive deep into the Parallel and Perpendicular Axes Theorems, exploring how to use them, their formulas, and real-world applications.
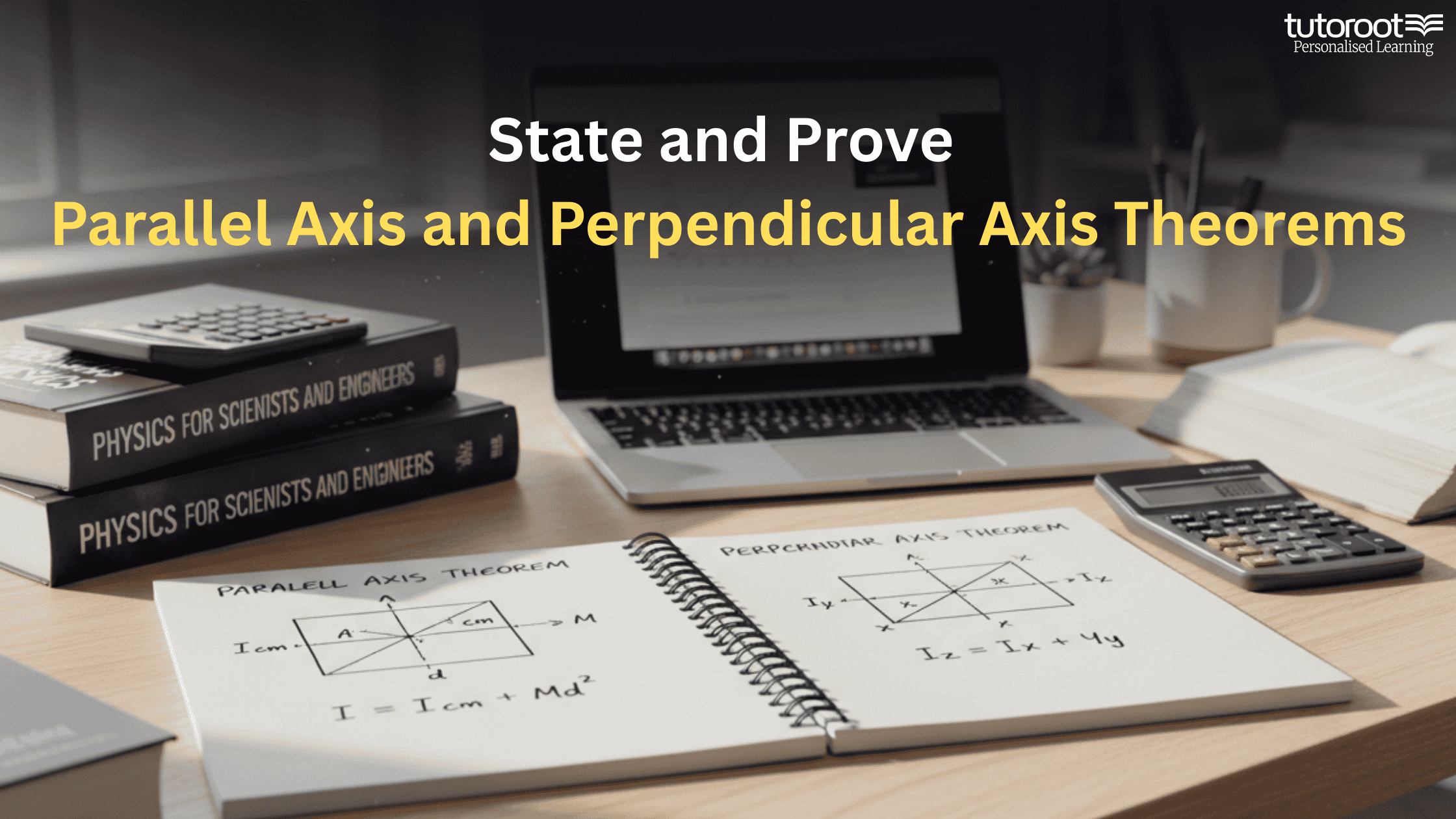
What is the Parallel Axis Theorem?
The Parallel Axis Theorem is used to calculate the moment of inertia of a rigid body around any given axis, provided that this axis is parallel to an axis passing through the object’s center of mass (where the moment of inertia is already known).
By definition, the theorem states: The moment of inertia of a body about any axis is equal to the sum of its moment of inertia about a parallel axis passing through its center of mass and the product of its mass and the square of the perpendicular distance between the two axes.
Parallel Axis Theorem Formula
The mathematical expression for the parallel axis theorem is:
Where:
-
$I$ = Moment of inertia of the body about the new parallel axis
-
$I_{c}$ = Moment of inertia around the center of mass
-
$M$ = Total mass of the body
-
$h$ = Perpendicular distance between the two parallel axes
How to Derive the Parallel Axis Theorem
Let $I_{c}$ be the moment of inertia of an axis passing through the center of mass $AB$, and $I$ be the moment of inertia around a new parallel axis $A’B’$ located at a distance $h$.
Imagine a single particle with mass $m$ located at a distance $r$ from the body’s center of gravity. The distance of this particle from the new axis $A’B’$ is therefore $(r + h)$.
Using the basic definition of moment of inertia:
Expanding the binomial:
Distributing the summation:
Because the axis $AB$ passes through the center of mass, the sum of the moments of mass about the center is zero ($\Sigma mr = 0$). Also, we know that $\Sigma m = M$ (total mass) and $\Sigma m r^{2} = I_{c}$. Substituting these into the equation:
Therefore, the derivation concludes as:
What is the Perpendicular Axis Theorem?
While the parallel theorem applies to 3D objects, the Perpendicular Axis Theorem only applies to planar, flat bodies (lamina) that have very little or no thickness.
It states that the moment of inertia of a planar body about an axis perpendicular to its plane is equal to the sum of its moments of inertia about two mutually perpendicular axes lying in the plane of the body, provided all three axes intersect at a single point.
Perpendicular Axis Theorem Formula
If a flat body is situated in the $xy$-plane, and you know its moment of inertia about the $x$-axis and $y$-axis, you can calculate the moment of inertia about the perpendicular $z$-axis using this expression:
Where:
-
$I_{x}$ = Moment of inertia around the X-axis
-
$I_{y}$ = Moment of inertia around the Y-axis
-
$I_{z}$ = Moment of inertia around the Z-axis (perpendicular to the plane)
Example of the Perpendicular Axis Theorem
Let’s calculate the moment of inertia of a uniform circular disc (like a perfectly round, flat piece of paper) about its diameter.
Let $M$ represent the total mass and $R$ represent the radius. We already know the moment of inertia of a disc about an axis passing through its center and perpendicular to its plane ($I_{z}$) is $\frac{M R^{2}}{2}$.
According to the perpendicular axes theorem:
Because the circular disc is completely uniform and symmetric, the moment of inertia along any diameter is the same. Therefore, $I_{x} = I_{y}$.
Substitute the known value of $I_{z}$:
Divide by 2 to solve for $I_{x}$:
Finally, the moment of inertia of a uniform disc about any of its diameters is equal to $\frac{M R^{2}}{4}$.
What are the Applications of Parallel and Perpendicular Axis Theorems?
By combining these two theorems, physicists and engineers can solve complex rotational dynamics problems. Key applications include:
-
Calculating complex shapes: Determining the moment of inertia of rigid bodies around any arbitrary axis, not just the center of mass.
-
3D Object Analysis: While the perpendicular theorem is for 2D planes, combining it with the parallel theorem helps calculate the moment of inertia for 3D spinning objects like cylinders and spheres.
-
Engineering and Mechanics: Crucial for designing structural beams, flywheels, and rotating machinery where mass distribution impacts stability and kinetic energy.
Final Notes
Are you struggling to keep up with complex mechanics and rotational dynamics in your Physics class? Mastering these derivations takes time, but expert guidance makes it easier.
Tutoroot offers highly interactive, 1-on-1 online physics classes designed to help you thoroughly understand and apply these concepts for your board and competitive exams.
Book a Free Demo with Tutoroot Today!
Frequently Asked Questions (FAQs)
State the parallel axis theorem.
The parallel axis theorem states that the moment of inertia of a body about any axis is equal to the sum of its moment of inertia about a parallel axis passing through its center of mass, plus the product of the body’s mass and the square of the perpendicular distance between the two axes.
What is the main difference between the parallel and perpendicular axis theorems?
The primary difference is their application. The parallel axis theorem can be applied to any 3D rigid body to find the moment of inertia about a parallel axis. The perpendicular axis theorem is strictly limited to 2D planar bodies (flat objects) to find the moment of inertia about a third perpendicular axis.
What is $I_c$ in the parallel axis theorem?
In the formula $I = I_{c} + M h^{2}$, $I_{c}$ represents the moment of inertia of the object about an axis that passes directly through its center of mass.